The intricate dance of policies, software, and hardware in robotics often hides a fundamental truth: even the most elegant AI algorithms can be crippled by low-level system inefficiencies. This was the core message delivered by Rishabh Garg, a Robotics Engineer at Tesla Optimus, during his insightful presentation at the AI Engineer World's Fair. Garg meticulously detailed the often-overlooked challenges in achieving robust, high-performance robotics, emphasizing that unexplained robot behavior frequently stems not from the control policy itself, but from the underlying software and electrical systems.
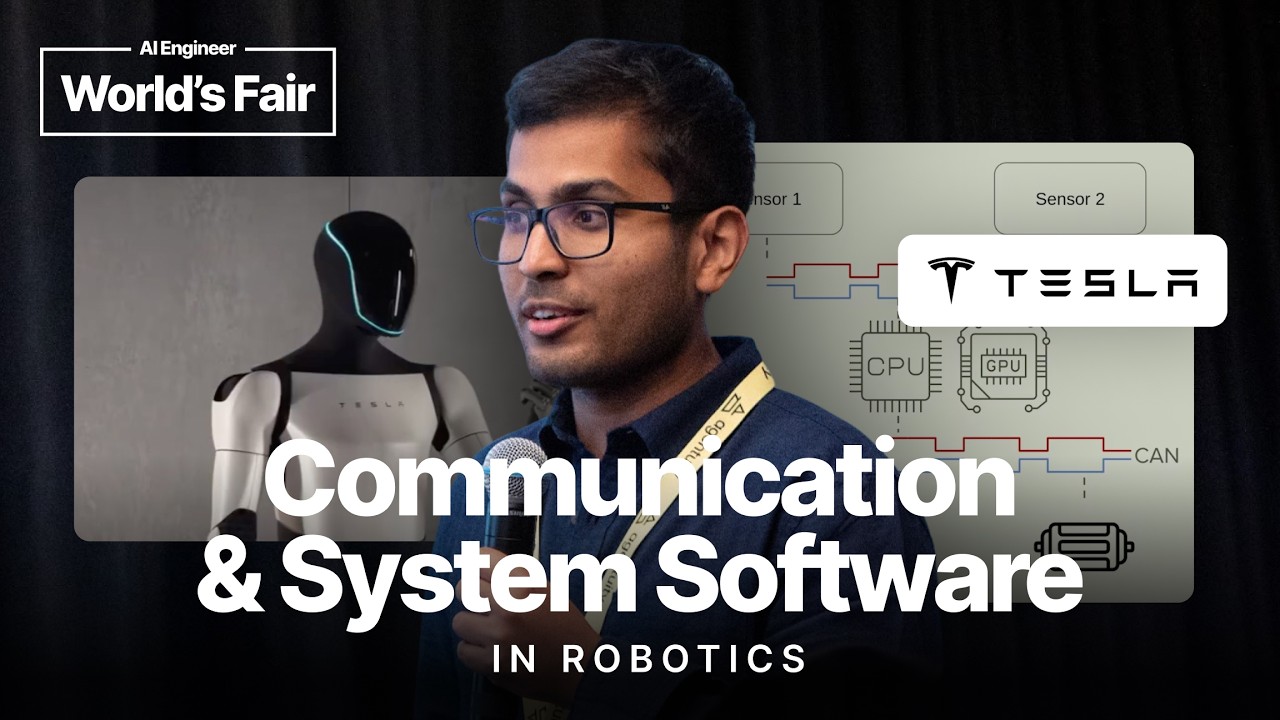
Garg began by illustrating a seemingly straightforward robotics system: sensors feeding data to a CPU/GPU, which then processes it through a control policy and sends commands to actuators via a CAN bus. The expectation for a simple loop, receive data, apply policy, send output, is a consistent, predictable cycle time, perhaps every two milliseconds. Yet, reality often deviates sharply. When deployed, such a loop exhibited unexpected gaps, creating delays that compromised real-time performance.